
BUSINESS
事業案内

トヨタマップマスターの貢献領域と事業ビジョン
ロケーションデータのスペシャリストとして
次世代のモビリティライフをイノベーションする。
トヨタマップマスターは1998年の創業以来、高精度かつ高鮮度なデジタル地図データベースを事業の中心として、皆様のより安心・安全なカーライフの実現に取り組んでまいりました。
柱となるカーナビゲーションシステム向け地図データベースはもちろん、より便利な情報を提供するWEB地図ASP*サービス、安全・安心を追求する運転支援(ADAS)や自動運転向けデータ制作、来るべき電動化社会に向けた電気自動車(BEV・FCEV)向けの取り組みなど、私たちの事業領域は時代と共に変遷を遂げてまいりました。
ロケーションデータのスペシャリストとして、モビリティライフの新たな価値創造を実現する。
それが、トヨタマップマスターが担う使命と考えています。
-
地図ASPサービス:当社の地図データベースをインターネット経由で提供すること
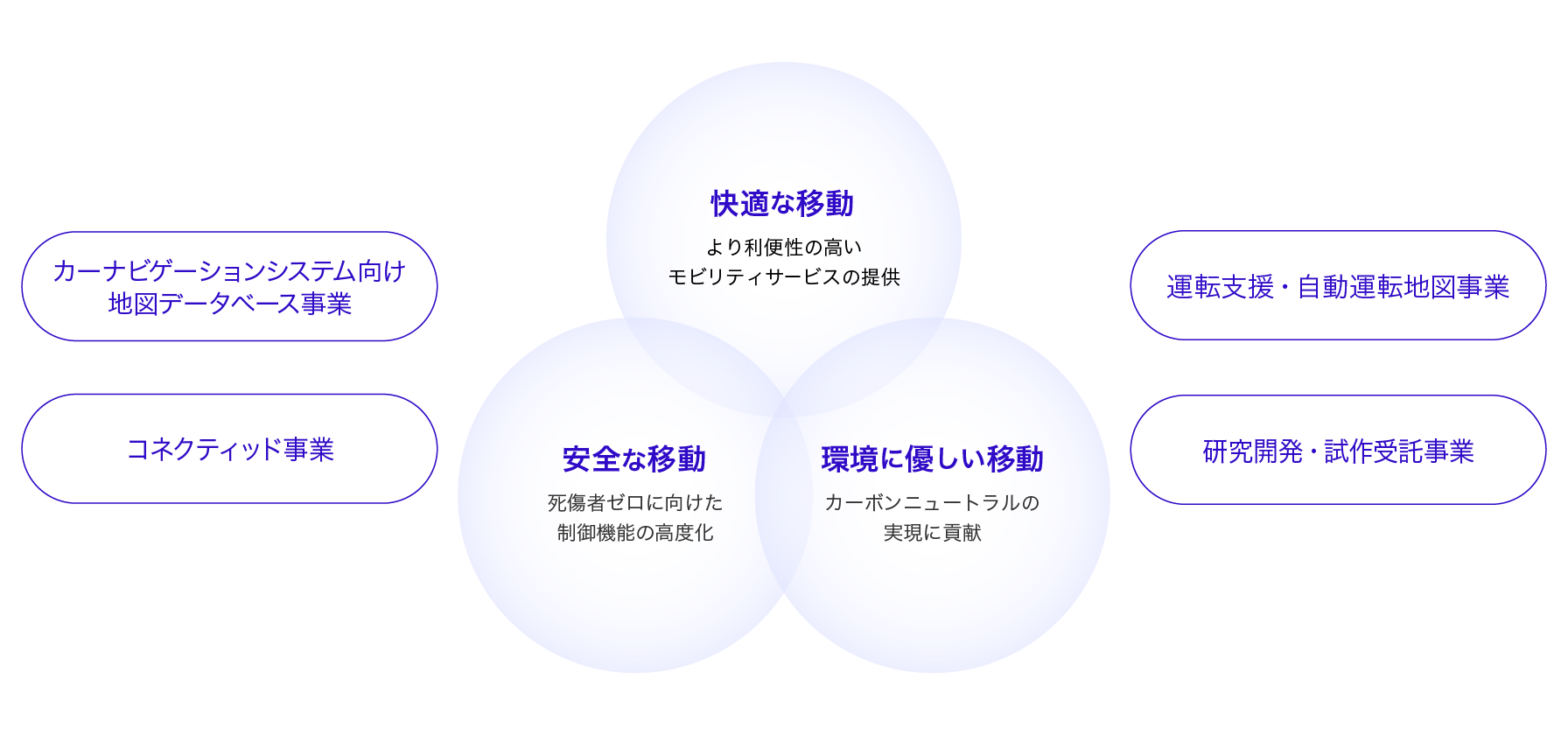
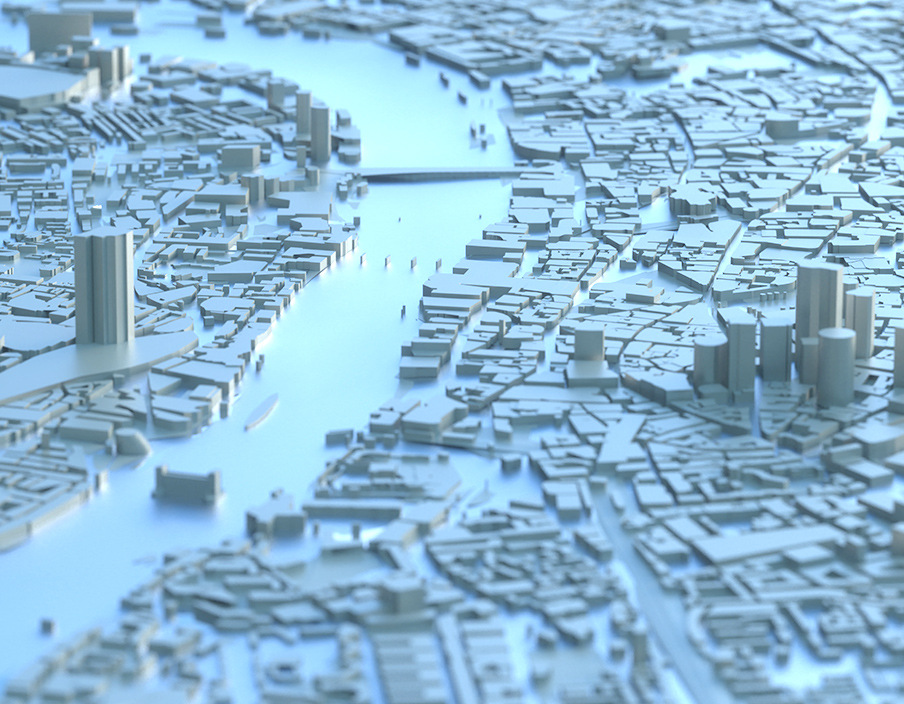
カーナビゲーションシステム向け地図データベース事業

カーメーカー様の純正ナビゲーションシステム向け地図データ制作で培った経験をもとに、高精度かつ高鮮度なデジタル地図制作を実現するプラットフォームを構築し、多くのカーメーカー様、ナビメーカー様向けに、日本全国を網羅する最新のデータベースを日々提供しています。
コネクティッド*事業
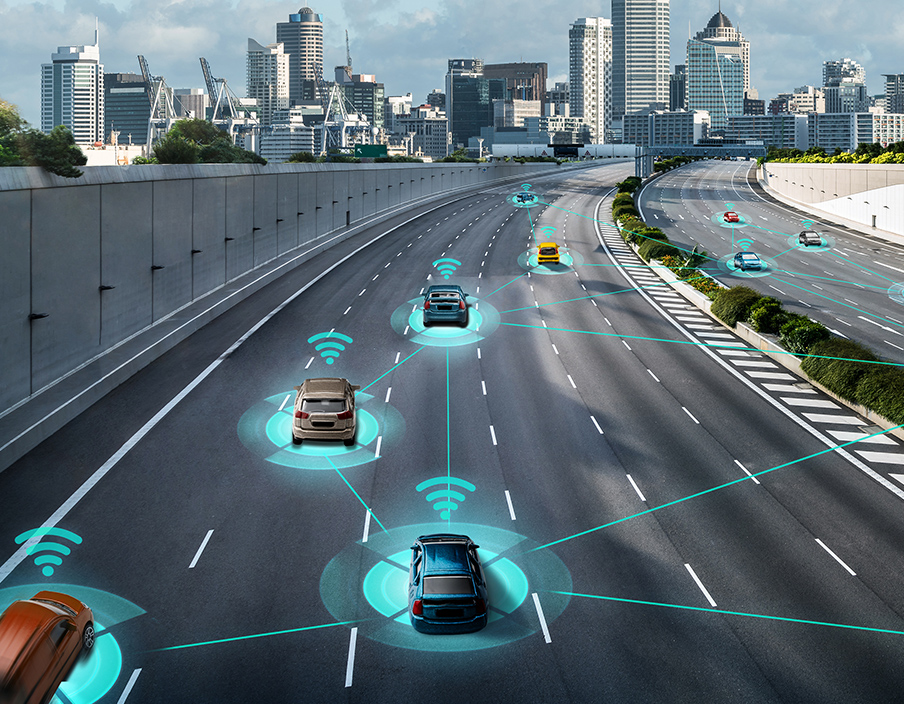
コネクティッドサービス構築の基盤となる、多彩な地図コンテンツ、様々な機能を備えた地図ASPサービスを提供しています。専門チームによるサポート体制を整え、コネクティッドサービスを支えるデータベースに関するあらゆる疑問にお答えします。
-
コネクティッド:クルマと社会をつなぎ、さらなる安全と安心を提供する仕組み
運転支援・自動運転地図事業
運転支援(ADAS)や自動運転向けに地図データベースの制作提供を行い、未来を拓く先進技術の普及・発展に貢献しています。
研究開発・試作受託事業

ロケーションデータベースのスペシャリストである当社の経験・ナレッジを活用し、お客様の様々なニーズにお応えするコンサルティング・開発体制を備えています。
ロケーションデータサービスやビッグデータ解析などの委託開発はぜひ当社にお任せください。
CONTACT
お問い合わせ
ご依頼やご相談など、お気軽にお問い合わせください。